等速円運動における速度と加速度
目次
等速円運動のイメージ
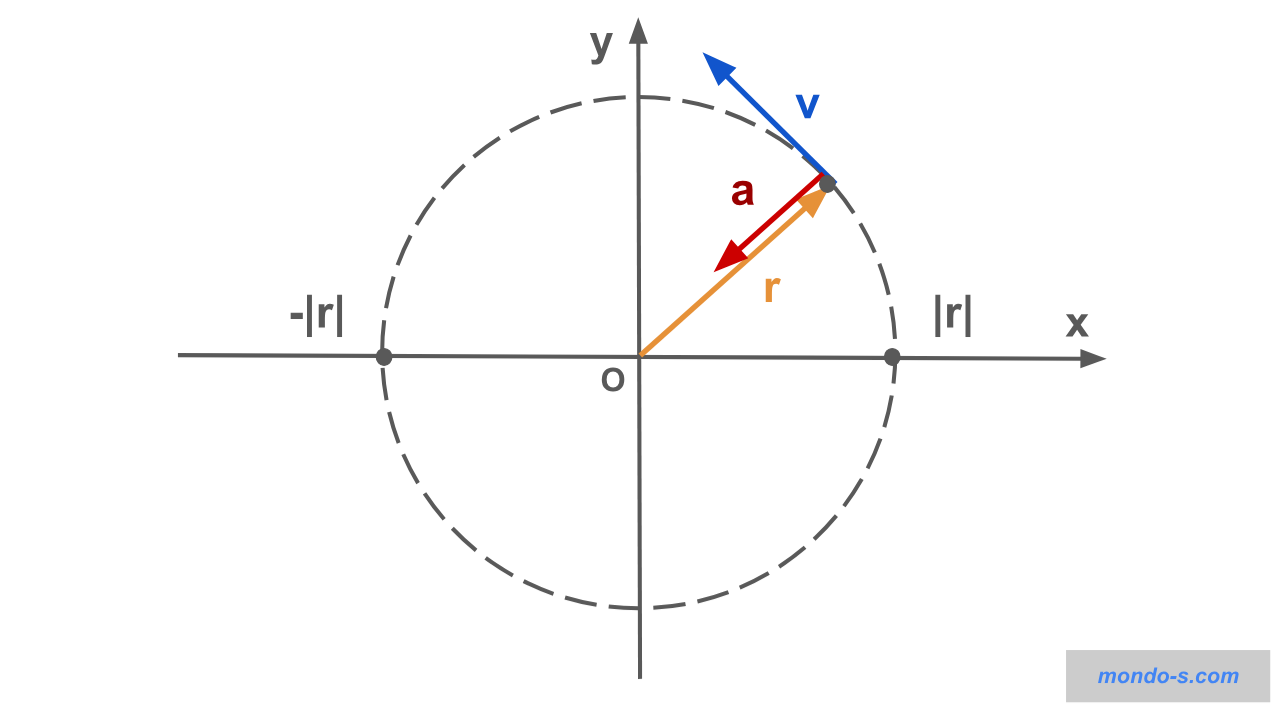
等速円運動(uniform circular motion)とは、質点が円周上を同じ大きさの速度※で移動する運動である。この運動における、位置ベクトル $\boldsymbol{r}$ (position vector)、速度ベクトル $\boldsymbol{v}$ (velocity)、加速度ベクトル $\boldsymbol{a}$ (acceleration)のイメージは下記となる。
※「速度の大きさ」は一定だが、「速度の方向」は速度の定義にしたがって時間変化するので、「速度」が一定ではないことに注意する。
速度ベクトルの方向は、速度の定義(位置の時間微分)における位置ベクトル同士の引き算によってイメージできる。
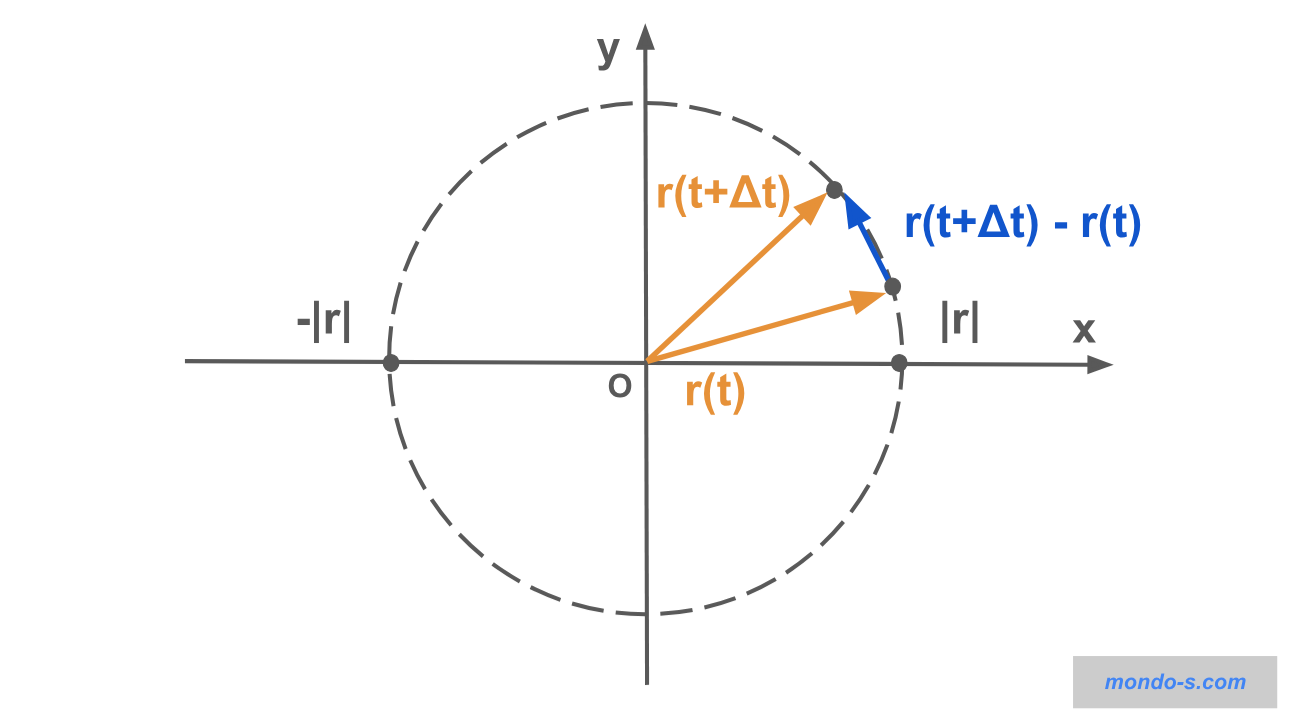
速度の定義
速度 $ \boldsymbol{v}(t) $ は、時間 $t$、位置ベクトル $\boldsymbol{r}(t)$ 、微分の定義を用いて下記で表せる。
\begin{align} \boldsymbol{v}(t) &= \lim_{\Delta t \to 0+} \frac{ \boldsymbol{r}(t+\Delta t) - \boldsymbol{r}(t) }{\Delta t} \end{align}また、下記でもある。
\[ \boldsymbol{v}(t) = \boldsymbol{r'}(t) \]加速度の定義
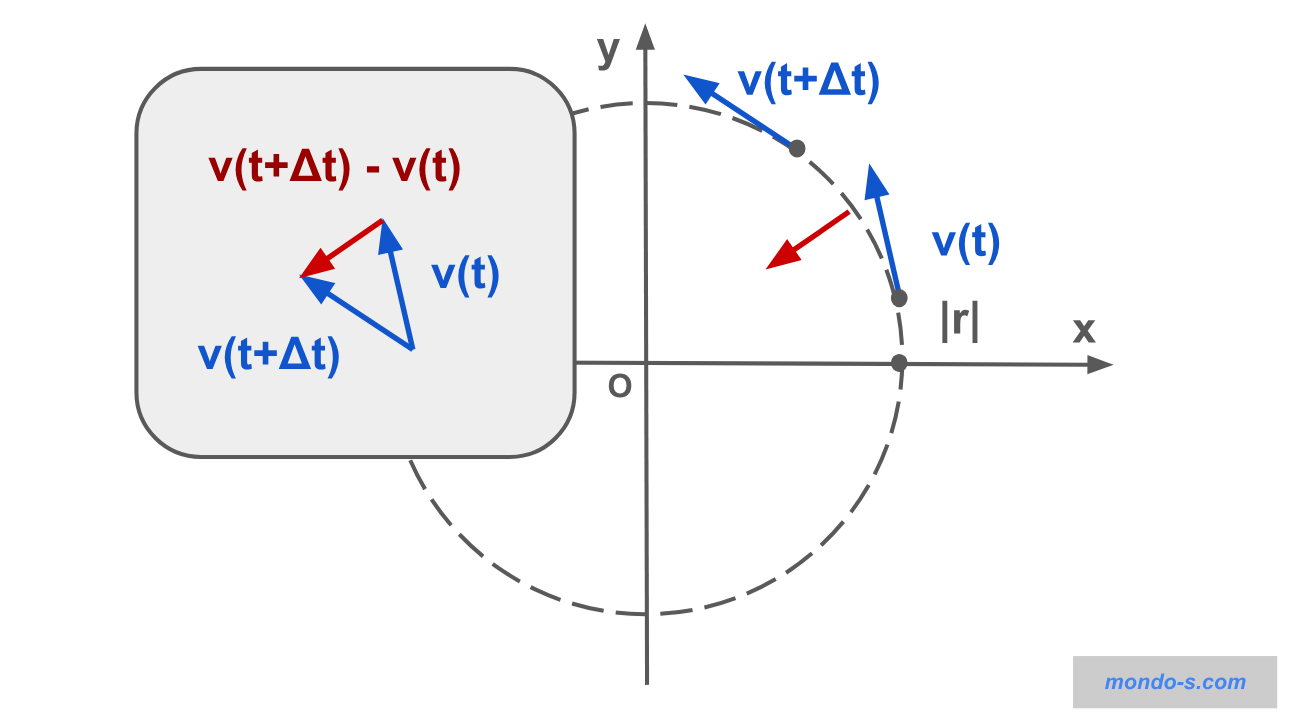
加速度 $ \boldsymbol{a}(t) $ は、下記で表せる。
\[ \boldsymbol{a}(t) = \lim_{\Delta t \to 0+} \frac{ \boldsymbol{v}(t+\Delta t) - \boldsymbol{v}(t) }{\Delta t} \]また、下記でもある。
\[ \boldsymbol{a}(t) = \boldsymbol{v'}(t) = \boldsymbol{r''}(t) \]等速円運動における位置ベクトル
xy平面上で座標の原点を中心とする半径 $ |\boldsymbol{r} | $ の円周上を等速円運動する質点の位置ベクトル $\boldsymbol{r}(t) $ は下記で表せる。ただし$\omega$は角速度(質点が単位時間あたりに回転するラジアン角度[rad/s])とする。
\[ \boldsymbol{r}(t) = |\boldsymbol{r} | \begin{pmatrix} \cos(\omega t) \\ \sin(\omega t) \\ \end{pmatrix} \]等速円運動における速度
加速度は、位置ベクトルを時間微分すれば導ける。
\[ \begin{align} \boldsymbol{v}(t) &= \dfrac{d}{dt}\boldsymbol{r}(t) \\ &= \dfrac{d}{dt} |\boldsymbol{r} | \begin{pmatrix} \cos(\omega t) \\ \sin(\omega t) \\ \end{pmatrix} \\ &= |\boldsymbol{r} | \dfrac{du}{dt} \dfrac{d}{du} \begin{pmatrix} \cos(u) \\ \sin(u) \\ \end{pmatrix} \\ &= |\boldsymbol{r}| \omega \begin{pmatrix} - \sin(\omega t) \\ \cos(\omega t) \\ \end{pmatrix} \\ \end{align} \]速度の大きさは、下記となり、時間に依らず一定である。
\[ \begin{align} | \boldsymbol{v} | &= | \boldsymbol{r} | \omega \{ (-\sin (\omega t) )^2 + (\cos (\omega t) )^2 \}^{\frac{1}{2}} \\ &= | \boldsymbol{r} | \omega \end{align} \]また、速度の大きさは、単位時間で移動する距離であるため、変化前の位置ベクトルと変化後(単位時間後)の位置ベクトルによって切り取られる弧の長さと考えることもできる。円弧の長さは、円周 $2\pi |r|$ に、$\dfrac{中心角}{360°} = \dfrac{\omega}{2\pi}$ を掛けたものなので、下記となる。
\[ \begin{align} | \boldsymbol{v} | &= 2\pi |r| \dfrac{\omega}{2\pi} \\ &= | \boldsymbol{r} | \omega \end{align} \]また、位置ベクトルと速度ベクトルの方向に注目すると、両者を内積すると下記の通り $0$ となるので、両者は常に直交することがわかる。
\[ \begin{align} & \begin{pmatrix} \cos(\omega t) \\ \sin(\omega t) \\ \end{pmatrix} ^\rm{T} \begin{pmatrix} - \sin(\omega t) \\ \cos(\omega t) \\ \end{pmatrix} \\ &= - \cos(\omega t) \sin(\omega t) + \sin(\omega t) \cos(\omega t) \\ &= 0 \end{align} \]等速円運動における加速度
加速度は、速度ベクトルを時間微分すれば導ける。
\[ \begin{align} \boldsymbol{a}(t) &= \dfrac{d}{dt}\boldsymbol{v}(t) \\ &= \dfrac{d}{dt} |\boldsymbol{r}| \omega \begin{pmatrix} - \sin(\omega t) \\ \cos(\omega t) \\ \end{pmatrix} \\ &= |\boldsymbol{r} | \omega \dfrac{du}{dt} \dfrac{d}{du} \begin{pmatrix} - \sin(u) \\ \cos(u) \\ \end{pmatrix} \\ &= |\boldsymbol{r} | \omega^2 \begin{pmatrix} - \cos(\omega t) \\ - \sin(\omega t) \\ \end{pmatrix} \\ \end{align} \]加速度の大きさは、下記となる。これも時間に依らず一定である。
\[ \begin{align} | \boldsymbol{v} | &= | \boldsymbol{r} | \omega^2 \{ (-\cos (\omega t) )^2+ (-\sin(\omega t))^2 \}^{\frac{1}{2}} \\ &= | \boldsymbol{r} | \omega^2 \end{align} \]また、速度ベクトルと加速度ベクトルの方向に注目すると、両者の内積が $0$ となり常に直交することがわかる。
また、位置ベクトルと加速度ベクトルの方向に注目すると、それぞれが常に逆向きのベクトルであることがわかる。
参考文献
ませまりかのホームページです。なにかを作ります。
免責事項
なるべく正しい情報を記載するよう努めておりますが、間違った情報を記載していることがありえます。 当サイトの情報の使用により生じた損害等について一切の責任を負いかねますのでご了承ください。
著作権
当サイトのコンテンツは著作権により保護されております。
リンク
当サイトへのリンクは自由に設置していただいて構いません。
アクセスログ
当サイトはアクセスログ(アクセス日時、IPアドレス、ブラウザなど)を記録しています。 これは個人を特定できる情報ではありません。 また、これをサイトの内容向上のための分析以外の目的で利用いたしません。
Cookie
当サイトはCookieを使用しておりません。
当サイトへのコメントは下記のリンクから受付いたしております。
Googleフォーム
https://docs.google.com/forms/d/e/1FAIpQLSd6i9qid97O2Na-9fxnRBqGNOQjqJ8wnmtlvOxpYvsaS7nQIQ/viewform?usp=sf_link